
Efektywność pracy robota biorącego udział w zautomatyzowanych procesach produkcyjnych nie jest jedynie zasługą jego parametrów technicznych, lecz także dodatkowego oprzyrządowania, wpływającego m.in. na możliwość wykonywania różnego rodzaju czynności. Stąd też tak istotnym elementem dla wydajności robota przemysłowego są efektory końcowe. Chwytaki robotów to obecnie kluczowe elementy wyposażenia większości tego typu urządzeń przemysłowych.
Chwytaki robotów o uniwersalnym zastosowaniu
Umiejętności chwytania i przenoszenia różnego typu elementów jest podstawową funkcją współczesnych robotów przemysłowych. Te zdolności są dziś wykorzystywane m.in. w procesie paletyzacji i depaletyzacji, montażu, załadunku i rozładunku, sortowania, pakowania oraz tzw. czynności pick and place. chwytaki robotów to wymienne elementy spełniające funkcję oprzyrządowania technologicznego, które pozwala na bezpośrednie prowadzenie konkretnego zadania.
Trzy kluczowe elementy
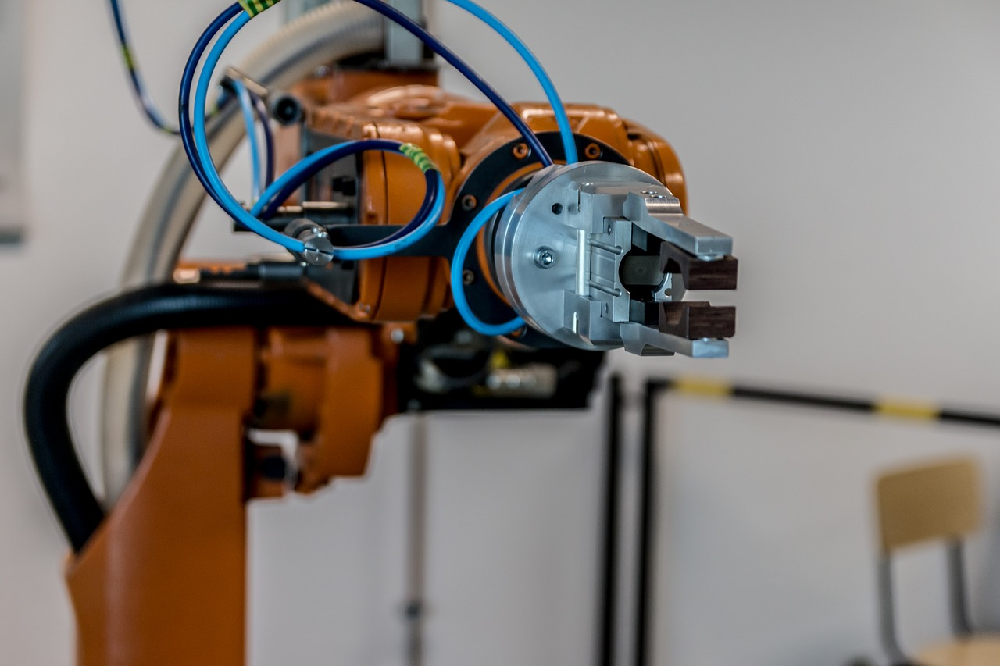
Efektory końcowe stanowią podstawowe wyposażenie jednostki kinematycznej urządzenia manipulacyjnego, pozwalając mu na wykonywanie zadań transportowych w procesie produkcyjnym. Konstrukcja tego rodzaju elementu jest dość zróżnicowana.
Chwytaki robotów budowane są w zasadzie z trzech podstawowych części - z zespołu napędowego, elementu przenoszącego napęd oraz z końcówek chwytnych. To od gabarytów i materiału, z jakiego wykonany jest transportowany produkt, oraz od przeznaczenia danego robota zależą w głównej mierze parametry poszczególnych elementów urządzenia. Konstrukcja chwytaka ma zapewniać mu prawidłowe uchwycenie oraz odpowiednią orientację przedmiotu, a także utrzymanie go i ostateczne odstawienie detalu w miejscu docelowe.
W standardowych zastosowaniach roboty przemysłowe posiadają zazwyczaj jeden chwytak (z możliwością jego wymiany), który wykonuje tę samą pracę. W bardziej zaawansowanych systemach przemysłowych stosuje się urządzenia zautomatyzowane dysponujące kilkoma chwytakami, co w efekcie skraca czas całego procesu produkcyjnego.
Czujniki monitorujące pracę robota oraz bezpieczeństwo człowieka
Dobór odpowiedniego chwytaka jest zależny od kilku podstawowych parametrów - typu wykonywanej czynności, rodzaju, wielkości, wagi oraz kształtu detalu, z którym urządzenie będzie pracować. Ponadto chwytaki robotów muszą być właściwie dobrane do udźwigu robota, a także do środowiska pracy. O ile standardowy chwytak składa się z trzech głównych elementów (napędu, przeniesienia napędu oraz końcówki chwytnej), o tyle duża części najnowszych rozwiązań tego typu dostępnych obecnie na rynku oferuje wiele innych dodatkowych funkcji. Współczesne chwytaki to coraz częściej urządzenia wysoce zaawansowane, posiadające np. czujniki pozycji, odległości, siły, momentu czy orientacji, a także inne innowacyjne rozwiązania technologiczne, które nie tylko pozwalają na wykonywanie przez robota dodatkowych operacji, ale również wpływają na bezpieczeństwo pracy, zwłaszcza w przypadku robotów współpracujących (tzw. cobotów). Czujniki nieustannie monitorują otoczenie i w przypadku nieplanowanego kontaktu z człowiekiem, obniżają siłę uchwytu, eliminując ryzyko spowodowania obrażeń u człowieka. Jednocześnie jednak zachowują odpowiednią siłę i parametry pracy, zapewniając również bezpieczeństwo trzymanego detalu.